Categories: Electricistes novells, Controladors programables
Nombre de visualitzacions: 8010
Comentaris sobre l'article: 4
Un exemple de millora del circuit elèctric d’un ascensor de mercaderies mitjançant un controlador programable (PLC)
Recentment, el tema de l’automatització de diversos processos tecnològics mitjançant controladors programables (PLC) s’ha fet cada cop més popular. Malgrat això, hi ha molt pocs articles pràctics a Internet amb exemples reals de com programar aquests PLC. Aquest tema és molt interessant, perquè es troba a la unió d'equips elèctrics, electrònica i de programació. És possible aprendre a escriure programes PLC sense tenir-ne. El mode d’emulació, disponible en tots els paquets de programari moderns, ajuda molt en això.
En aquest article mostraré un exemple de traducció d’un circuit elèctric integrat en dispositius de relé (arrencadors, relés) a un programa que funcionarà al controlador. He de dir de seguida que es tracta només d’un petit projecte educatiu i que no pretén explicar res més que només explicar els principis bàsics de la programació de PLC amb un exemple concret.
Relé de relleu de mercaderies
L'esquema inicial d'aquest projecte és un esquema relativament simple d'un ascensor de mercaderies (ascensor de mercaderies) amb control de palanca en dues plantes. El diagrama es mostra a la figura següent.

Polipast elèctric municipal amb un motor a dues parades
Al circuit només hi ha un motor, que puja i baixa l’elevació entre dues plantes. Es tracta d’un motor asíncron trifàsic reversible amb un rotor de fase de V. V. Les resistències d’arrencada i els contactes de tres arrencadors electromagnètics estan connectats al rotor del motor, permetent que el motor s’engegui en tres etapes. Aquesta solució permet en el procés d’arrencar el motor reduir el seu corrent d’arrencada i augmentar el parell d’inici.
L’arrencada del motor s’automatitza mitjançant tres relés d’acceleració (1RU - 3RU). Es tracta de temporitzadors convencionals de 24 volts de corrent continu. Per la seva potència hi ha un transformador reduït i rectificador.
Un fre electromagnètic en bloc trifàsic està connectat als terminals del motor, que, quan s’aplica tensió al motor, frena el seu eix i, quan desapareix la tensió, l’eix del motor es fixa instantàniament i es fixa en posició fixa.
Marxa enrere del motor mitjançant contactes de dos arrencadors electromagnètics (en diagrama B i H). L'alimentació del circuit es subministra mitjançant un interruptor (al circuit - WU) i un interruptor (1A).
La inclusió en el treball de l’ascensor només és possible en presència de tensió. Està controlat per un relé de tensió (PH), situat al costat esquerre del circuit. També hi ha endolls i una campana que es pot encendre des de qualsevol lloc per trucar al conductor.
Les portes de l’eix i de la cabina s’obren i es tanquen manualment. L’elevador es controla mitjançant l’interruptor de la palanca en tres posicions: “Up”, “Down” i “Zero”.
Quan el mànec es trasllada a una de les posicions extremes, l'elevador comença a moure's i quan s'aconsegueix el terra desitjat, el mànec es trasllada mecànicament a la posició "Zero". Al mateix temps, els contactes del circuit d’interruptors es trenquen, la bobina d’arrencada es desactiva, el motor es desconnecta de la xarxa, els contactes del circuit del rotor s’obren i l’elevador s’atura. Després d'això, podeu iniciar el moviment de l'elevador en sentit contrari.

L’elevador de mercaderies pertany a dispositius d’alt risc i en el seu circuit (com en els circuits de qualsevol ascensor) hi ha un gran nombre d’interbloques diferents limitar els contactes del commutador i contactes de diversos dispositius de protecció.
En aquest esquema, es tracta de interruptors de desviació que controlen el tancament de les portes de la cabina, els eixos als pisos inferiors i superiors, l'aixecament i baixada de la cabina per sobre de les zones superiors i inferiors de treball, els contactes del "despreniment de les cordes elevadores" que s'obren quan el cable s'afebleix o es deixa anar. cabina de l’elevador, contactes del limitador de velocitat, captador i tensor de cables. En total: 14 sensors discrets.
Quan s’obre qualsevol dels contactes enumerats, el motor de l’ascensor s’ha d’apagar i frenar instantàniament, per tant tots els sensors, el contacte del relé de tensió i el botó “parada general” estan connectats en sèrie al circuit de bobines dels actuadors electromagnètics que controlen el motor.
Creació d'un programa de PLC per a un ascensor de mercaderies
La tasca era que, sense canviar res del dispositiu, en principi, el funcionament i els controls de l’ascensor, transferir el seu circuit des d’una vista de relé obsoleta a una opció mitjançant un controlador programable.
L’avantatge del formulari del programa per controlar la instal·lació és que, en el futur, si es vol, es pot modificar fàcilment el programa, millorar la comoditat de controlar l’ascensor, canviar la lògica del seu funcionament i millorar la seva funcionalitat. Però aquestes accions han d’anar acompanyades d’un canvi en el disseny de l’ascensor i de l’addició d’altres dispositius addicionals al circuit. A la nostra versió, aquesta tasca no es plantejava.
En aquest cas, s'ha proposat una opció per modernitzar els equips elèctrics d'un ascensor de mercaderies canviant el seu esquema de control amb un enfocament que, per exemple, no canviaria absolutament res per a una persona que opera un mecanisme d'aquest tipus.
Per tant, estalviarem el principal dispositiu de control de l’ascensor: l’interruptor de la palanca i deixarem el motor asíncron amb el rotor de fase amb la posada en marxa de tres etapes, tot i que encara volem substituir-lo per un motor asíncron per un rotor de gàbia d’esquirol, que s’encén a través de l’arrencador suau. Però, de moment, no ho farem, ja que aquesta solució simplificarà molt el circuit elèctric de l’ascensor, cosa que no és gaire complicada.
Així doncs, dividirem el nostre esquema en quatre zones (vegeu l’esquema dels ascensors de la figura).
")
A la zona 1, no tocarem res, perquè Ella és la responsable de la trucada sonora de l'elevador i de controlar la presència de tensió al circuit. La zona 2 amb el motor, el fre electromagnètic i els contactes de potència dels arrencadors tampoc canvien. Es poden suprimir tots els dispositius de la zona 4 perquè l'ordre d'inclusió de contactes al circuit del rotor del motor quan es posa en marxa estarà controlat per temporitzadors de programari. Resta zona 3. La principal modernització afectarà aquesta zona particular.

Com a controlador, prenem l’empresa de PLC Aries. El programa per a ell serà en la llengua Cfc. Segons la meva opinió, aquest és el llenguatge més convenient per a principiants. És molt semblant al llenguatge dels blocs funcionals Fbdperò amb les seves pròpies petites característiques. Tants estimen un altre gran idioma - llengua d’escala LD. No tinc res en contra, però endavant Cfc Per a mi és més convenient compilar un programa per a PLC, així que he utilitzat aquest llenguatge, però aquí tot és per a tothom. Per compilar el programa que fem servir el paquet CoDeSys 2.3.

Un programa és un conjunt de blocs funcionals (I, O, NO, activadors i temporitzadors). El programa de treball del telecadira en idioma Cfc:

Inicialment necessitarem blocs I (element I). A la sortida de l'element hi ha una unitat lògica (al programa -"VERITAT") només quan les unitats lògiques també es troben a totes les entrades. Si l’estat d’una sola entrada difereix de la unitat, la sortida es restablirà a zero (al programa - "Fals").
Aquest element ens ajudarà a organitzar tots els contactes interconnectats i contactes de seguretat (entrades discretes) i, segons recordeu, n’hi ha 14 (al programa s’indica amb el nom SQ1 - SQ14). A l’entrada del bloc I també connectem el contacte del relé de tensió i el botó "Parada general" (SB1). Per comoditat, vaig fer tots els contactes en 3 elements Ii, després, se'n va fer servir un altre per combinar-los en una cadena.
Per defecte, quan s’afegeix al programa, qualsevol unitat funcional té 2 entrades. Si voleu afegir una entrada addicional, heu d’apuntar al bloc amb el ratolí, premeu el botó dret al damunt i seleccioneu "Bloquejar entrada". Així, podeu afegir al bloc qualsevol nombre d’entrades addicionals necessaris.

El commutador de palanca està connectat a dues entrades del controlador (al programa - "SA_verh" i "SA_niz"). Un interruptor en cadascuna de les seves dues posicions extremes subministra una unitat lògica a una de les dues RS desencadenants ("RS_verh" o "RS_niz"). Un disparador és l’anàleg d’una bobina d’arrencada amb un contacte de bloqueig en un circuit de control del relé.
Per activar-la, envieu la unitat lògica al contacte "CONJUNT"desactivar - activat"RESET". Sortida de disparador "Q1"transmet un senyal a una de les sortides del controlador -"KM1" o "KM2"a les quals està connectat bobines de solenoides. Els arrencadors canvien els contactes i controlen el motor.

L’inici de tres etapes del programa s’organitza mitjançant 2 temporitzadors "TON". Quan apliqueu una unitat lògica a l’entrada del temporitzador "DINS"compta el temps donat a l'entrada"PT"i canvia la sortida de retard de temps"P"del zero lògic a un. Després que el primer temporitzador (T1) es desencadena per un senyal de la seva sortida (Q), el temps comença a comptar amb el segon temporitzador (T2) i després d'un temps especificat a l'entrada PT, el segon temporitzador també envia una unitat lògica a la seva sortida (Q) .
Per controlar les sortides (al programa - KM3, KM4 i KM5) Es connecten 3 bobines d’arrencador electromagnètic. El primer d'ells s'activa immediatament quan activeu KM1 o KM2 i connecta la màxima resistència al rotor del motor, KM4 i KM5 Engegueu-lo mitjançant un temporitzador i alternativament una part de curtcircuit de la resistència inicial. Després de posar en marxa el motor, els tres arrencadors es mantenen en posició.

Ítem O (OR lògic) necessària per iniciar un dels dos arrencadors principals, es va incloure a l’obra la part del circuit responsable de la posada en funcionament del motor de tres etapes. Si hi ha una unitat lògica en una de les entrades de l'element "O", una unitat lògica es transmet a la seva sortida, és a dir, per al seu funcionament és suficient un senyal en qualsevol de les seves entrades.

Entre temporitzadors i sortides del controlador I amb una de les entrades inverses (cercle d’entrada). Per a aquest element, una unitat lògica a la sortida només apareix quan un senyal d’unitat lògica s’aplica a una entrada normal i un zero lògic s’aplica a una inversa.

El mateix element, només amb dues entrades inverses, es troba al costat de les entrades "SA_verh" i "SA_niz", rebent senyals del commutador de palanca. Això és necessari per garantir que tots els arrencadors de les sortides s’apaguen quan l’interruptor torna a la posició zero, quan els circuits de pujada i baixada estan oberts.
Si a l'entrada d'aquest element hi ha dos zeros lògics I dóna una unitat lògica a la sortida de l’element. Aquest senyal arriba a través del programa per l'entrada de disparadors "RESET", els activadors es restableixen a zero i els arrencadors de les sortides estan desactivats. Elements I amb una entrada inversa entre temporitzadors i sortides KM3 i KM4 apagueu aquestes sortides i, en conseqüència, apagueu els arrencadors encarregats d’evitar les resistències del circuit del rotor quan el motor s’atura.

Per configurar una entrada o una sortida inversa, cal moure el ratolí al bloc funcional, seleccioneu l’entrada o sortida desitjada, premeu el botó dret del ratolí i seleccioneu "Invertir". De la mateixa manera, qualsevol entrada o sortida inversa es pot convertir en regular.
Ítems I Els números 5 i 10 no permeten que els arrencadors responsables de conduir el motor de pujada i baixada s’encenen alhora (protecció contra curtcircuits als contactes de corrent dels arrencadors mentre s’encenen). Tot i que en aquest esquema amb commutador de palanca, això no és possible.Però atès que els contactes d’aquest tipus estaven presents en el circuit del relé original, es va decidir mantenir-los al programa del PLC.
I finalment, queda proporcionar una parada instantània del motor elèctric en obrir qualsevol dels contactes a l’entrada. La presència de disparadors al circuit no va permetre fer-ho inicialment. Perquè el circuit funcioni correctament en qualsevol emergència (activació de contactes de seguretat, contactes dels interruptors de desviació, contacte del relé de tensió o el botó “parada general”), es va afegir un circuit dues cadenes d’elements NO i O (4 i 7).
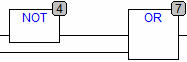
L’element NOT precedeix la unitat lògica a l’entrada al zero lògic a la sortida i viceversa: el zero a l’entrada a la unitat de sortida. Podeu explicar com funcionen les cadenes de NO i OR al programa? Escriviu els comentaris.
Emulació del treball del programa en llenguatge CFC en CoDeSys
Després de crear el programa, podeu comprovar-ho CoDeSys en mode d’emulació. Per fer-ho, seleccioneu el "Mode d'emulació" a la pestanya "En línia", feu clic al botó "Connectar" i, després, configureu la unitat lògica a totes les entrades - "VERITAT", escriviu aquests valors al programa fent clic a"Ctrl" + F7 i feu clic F5 per començar.
Mode d’emulació aCoDeSys:

Simulant la commutació d'entrada ("VERITAT"i"Fals") podeu mirar el canvi de circuits en blau (ruta del senyal) i el canvi de l'estat de les sortides. Després de cada canvi en l'estat d'entrada, no oblideu escriure aquests valors al programa prement"Ctrl" + F7. Per desactivar el mode d’emulació, feu clic a "Atura", després "Desconnecta" a la pestanya "En línia" i desmarqueu el "Mode d’emulació".
Conclusió
Una vegada més, vull destacar que aquest projecte estava exclusivament relacionat amb finalitats educatives i encara no s’ha provat en un controlador programable real. Si teniu cap pregunta i qualsevol dels punts anteriors no queda clar, pregunteu-la als comentaris, intentaré respondre-les. I també per a mi és molt important obtenir una resposta a la pregunta: he de continuar escrivint articles sobre aquest tema? En general, estic disposat a escoltar qualsevol comentari i suggeriment constructiu.
Consulteu també a electro-ca.tomathouse.com
: