Categories: Articles destacats » Domòtica
Nombre de visualitzacions: 149188
Comentaris sobre l'article: 5
El principi de funcionament i els fonaments bàsics de la programació de PLC
Controladors lògics programables (PLCs)
 Abans de l’arribada de circuits lògics d’estat sòlid, el desenvolupament de sistemes de control lògic es basava en relés electromecànics. A dia d’avui, els relés no estan desfasats al seu destí, però en algunes de les funcions anteriors són substituïts per un controlador.
Abans de l’arribada de circuits lògics d’estat sòlid, el desenvolupament de sistemes de control lògic es basava en relés electromecànics. A dia d’avui, els relés no estan desfasats al seu destí, però en algunes de les funcions anteriors són substituïts per un controlador.
A la indústria moderna hi ha un gran nombre de sistemes i processos diferents que requereixen automatització, però ara aquests sistemes rarament estan dissenyats a partir de relés. Els processos de producció moderns necessiten un dispositiu programat per realitzar diverses funcions lògiques. A finals dels anys seixanta, la companyia nord-americana Bedford Associates va desenvolupar un dispositiu informàtic anomenat MODICON (Modular Digital Controller). Més tard, el nom del dispositiu es va convertir en el nom de la unitat de l’empresa que el va dissenyar, fabricar i vendre.
Altres empreses van desenvolupar les seves pròpies versions d’aquest dispositiu i, al final, es va fer conegut com PLC, o controlador lògic programable. L’objectiu d’un controlador programable capaç de simular el funcionament d’un gran nombre de relés era substituir els relés electromecànics per elements lògics.
El PLC té un conjunt de terminals d’entrada amb els quals podeu supervisar l’estat de sensors i commutadors. També hi ha terminals de sortida que proporcionen un senyal “alt” o “baix” als indicadors de potència, a les vàlvules de solenoide, als contactors, als motors petits i a altres dispositius d’auto-monitoratge.
Els PLC són fàcils de programar perquè el seu llenguatge de programació s’assembla a la lògica d’un relé. Així, un electricista industrial ordinari o un enginyer elèctric, acostumat a llegir circuits lògics d’escala, se sentirà còmode quan programi un PLC per fer les mateixes funcions.
La connexió de senyal i la programació estàndard són una mica diferents per a diferents models de PLC, però són molt similars, cosa que permet posar aquí una introducció "general" a la programació d'aquest dispositiu.
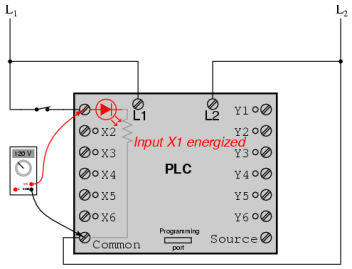
La il·lustració següent mostra un PLC senzill, o millor dit, com pot semblar al davant. Dos terminals de cargol per connectar circuits interns de PLC de fins a 120 VAC es marquen L1 i L2.
Sis terminals de cargol situats al costat esquerre proporcionen connexió per als dispositius d'entrada. Cada terminal representa el seu canal d’entrada (X). El terminal de cargol (connexió "general") situat a la cantonada inferior esquerra sol estar connectat a la font de corrent L2 (neutre) amb una tensió de 120 V AC.

A l’interior de l’allotjament del PLC que connecta cada terminal d’entrada a un terminal comú, hi ha un aïllador de dispositiu (LED) que proporciona un senyal elèctric “alt” aïllat per al circuit informàtic (un fototransistor interpreta la llum LED) quan s’instal·la un corrent altern de 120 volts entre el terminal d’entrada corresponent i el comú. terminal. El LED de la part frontal del PLC permet comprendre quina entrada és en directe:
Els senyals de sortida són generats per circuits informàtics PLC, activant un dispositiu de commutació (transistor, tiristor, o fins i tot un relé electromecànic) i connectant el terminal “Source” (cantó inferior dret) a qualsevol sortida marcada amb una lletra Y. El terminal Source sol estar associat a L1. Igual que cada entrada, cada sortida que s’energia està marcada amb un LED:
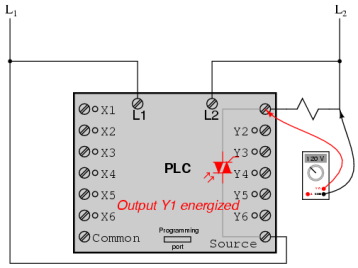
Així, el PLC es pot connectar a qualsevol dispositiu, com interruptors i electroimants.
Conceptes bàsics de programació de PLC
La lògica moderna del sistema de control s’instal·la al PLC mitjançant un programa informàtic.Aquest programa determina quines sortides són en directe i en quines condicions d’entrada. Tot i que el programa en si s’assembla a un circuit lògic del relé, no hi ha contactes d’interruptor ni bobines de relé que funcionen dins del PLC per crear connexions entre entrada i sortida. Aquests contactes i bobines són imaginaris. El programa s'escriu i visualitza mitjançant un ordinador personal connectat al port de programació del PLC.
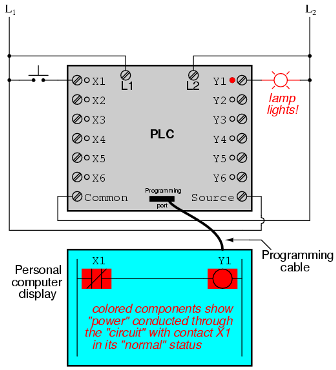
Considereu el següent circuit i programa de PLC:
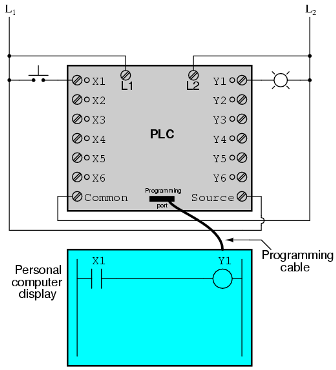
Quan el polsador no està activat (en estat desactivat), el senyal no s’envia a l’entrada X1. D'acord amb el programa, que mostra l'entrada "oberta" X1, el senyal no s'enviarà a la sortida Y1. Així, la sortida Y1 es mantindrà desactivada i l’indicador connectat a ella s’apagarà.
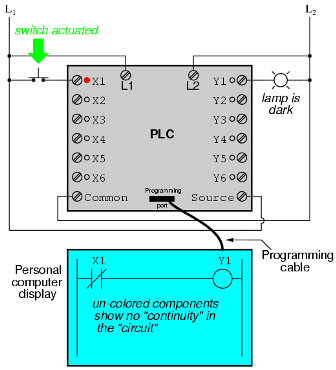
Si es prem el commutador polsador, el senyal serà enviat a l’entrada X1. Tots els contactes X1 del programa suposaran un estat activat, com si fossin contactes de relé activats subministrant tensió a una bobina de relé anomenada X1. En aquest cas, el contacte obert X1 quedarà "tancat" i enviarà un senyal a la bobina Y1. Quan s’energia la bobina Y1, la sortida Y1 s’encendrà amb una bombeta connectada a ella.
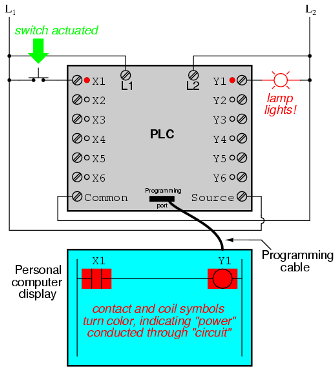
S'ha d'entendre que el contacte X1 i la bobina Y1 estan connectades mitjançant cables i que el "senyal" que apareix al monitor de l'ordinador és virtual. No existeixen com a components elèctrics reals. Només estan presents en un programa informàtic –part del programari– i només s’assemblen al que passa al circuit del relé.
És igualment important comprendre que l’ordinador que s’utilitza per escriure i editar el programa no és necessari per a un major ús del PLC. Després que el programa s'hagi carregat al controlador programable, l'ordinador es pot apagar i el PLC executarà de forma independent les ordres del programa. Incloum un monitor d’ordinador personal a la il·lustració per tal que entengueu la connexió entre les condicions reals (estat de tancament de llum i estat de la làmpada) i els estats del programa (senyals a través de contactes virtuals i bobines virtuals).
La veritable potència i versatilitat del PLC es revela quan volem canviar el comportament del sistema de control. Com que el PLC és un dispositiu programable, podem canviar les ordres que tenim configurades sense reconfigurar els components connectats a ell. Suposem que hem decidit canviar la funció “interruptor - bombeta” al revés: premeu el botó per apagar la bombeta i alliberar-la per encendre-la.
La solució d’aquest problema en condicions reals és que l’interruptor, “obert” en condicions normals, es substitueix per un “tancat”. La seva solució de programari està canviant el programa perquè el contacte X1 en condicions normals estigui "tancat" i no "obert".
A la imatge següent veuràs un programa ja canviat, amb el commutador no activat:
I aquí s’activa l’interruptor:
Un dels avantatges d’implementar el control lògic en programari, en contraposició al control mitjançant maquinari, és que els senyals d’entrada es poden utilitzar tantes vegades com calgui. Per exemple, considereu un circuit i un programa dissenyats per encendre una bombeta si almenys dos dels tres commutadors estan activats alhora:
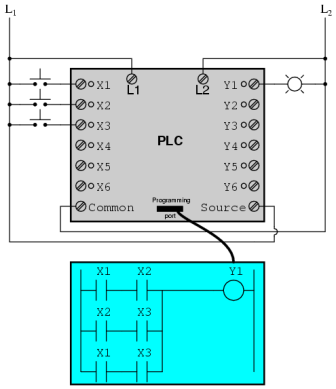
Per construir un circuit similar amb un relé, es necessitaran tres relés amb dos contactes oberts en condicions normals, cadascun dels quals s’ha d’utilitzar. Tot i això, utilitzant el PLC, podem programar tants pins per a cada entrada “X” com desitgem sense afegir cap equip addicional (cada entrada i sortida no hauria d’ocupar més d’un bit a la memòria digital del PLC) i trucar-los tantes vegades com calgui .
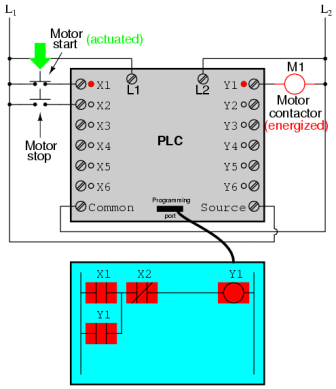
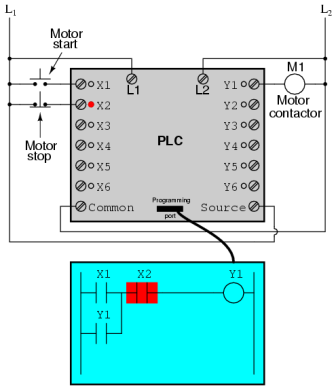
A més, com que cada sortida de PLC no ocupa més d’un bit en la seva memòria, podem afegir contactes al programa, portant la sortida Y a un estat no activat. Per exemple, prenguem un esquema del motor amb un sistema per controlar l’inici del moviment i l’aturada:
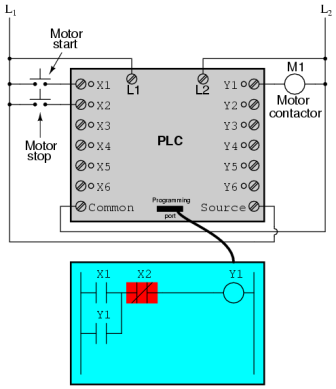
L’interruptor connectat a l’entrada X1 serveix com a botó “Inici”, mentre que l’interruptor connectat a l’entrada X2 serveix de botó “Stop”. Un altre contacte, anomenat Y1, com la impressió en contacte, permet que el contactor del motor es mantingui activat, encara que allibereu el botó d’inici. En aquest cas, es pot veure com el contacte X2, "tancat" en condicions normals, apareix al bloc de colors, mostrant així que es troba en l'estat "tancat" ("elèctricament conductor").
Si premeu el botó "Inici", un corrent passarà pel contacte "tancat" X1 i enviarà 120 VAC al contactor del motor. El contacte paral·lel Y1 també es "tancarà", tancant així el circuit:
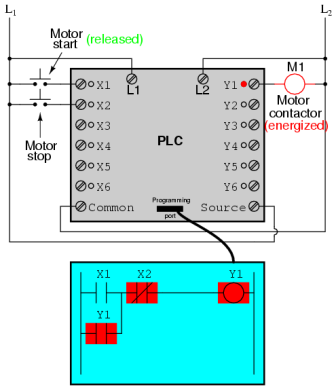
Si prement ara el botó "Inici", el contacte X1 passarà a l'estat "obert", però el motor continuarà funcionant, perquè el contacte tancat Y1 encara mantindrà la bobina en marxa:
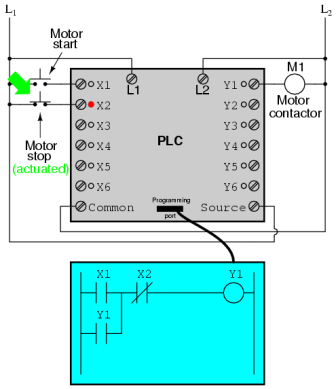
Per aturar el motor, cal prémer ràpidament el botó "Stop", que reportarà la tensió a l'entrada X1 i al contacte "obert", que donarà lloc a la terminació del subministrament de tensió a la bobina Y1:
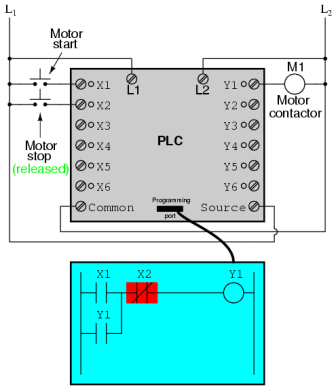
En prémer el botó “Stop”, l’entrada X1 va quedar sense tensió, retornant així el contacte X1 al seu estat normal “tancat”. En cap cas, el motor tornarà a funcionar fins que no torni a prémer el botó d’inici, perquè s’ha perdut la impressió al pin Y1:
Un model tolerant als errors de control dels PLC és molt important, com és el cas dels dispositius de control de relé electromecànics. Sempre cal tenir en compte l'efecte d'un contacte erròniament "obert" sobre el funcionament del sistema. Així, per exemple, en el nostre cas, si el contacte X2 està "obert" erròniament, no hi haurà manera d'aturar el motor.
La solució a aquest problema és reprogramar el contacte X2 dins del PLC i, en realitat, prémer el botó Stop:
Quan no es prem el botó "Stop", s'introdueix l'energia del PLC X2, és a dir. el contacte X2 està "tancat". Això permet que el motor comenci a funcionar quan es comunica el corrent al terminal X1, i continuï funcionant quan es deixa anar el botó "Inici". En prémer el botó "Stop", el contacte X2 entra en estat "obert" i el motor deixa de funcionar. Així, podeu veure que no hi ha cap diferència funcional entre aquest i el model anterior.
Tanmateix, si el terminal d’entrada X2 s’ha “obert” erròniament, es pot aturar l’entrada X2 prement el botó “Aturar”. Com a resultat, el motor s'apaga immediatament. Aquest model és més segur que l’anterior, en prémer el botó “Stop” farà impossible l’aturada del motor.
A més de les entrades (X) i les sortides (Y) del PLC, és possible utilitzar “contactes i bobines internes. S'utilitzen de la mateixa manera que els relés intermedis que s'utilitzen en els circuits de relé estàndard.
Per comprendre el principi de funcionament dels circuits i contactes "interns", considereu el circuit i el programa següents desenvolupats a partir de les tres entrades de la funció lògica I:
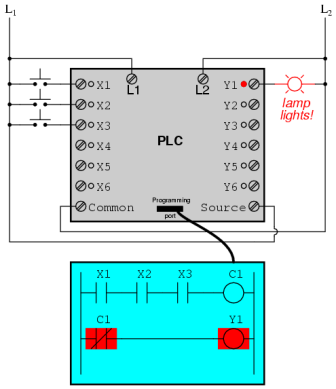
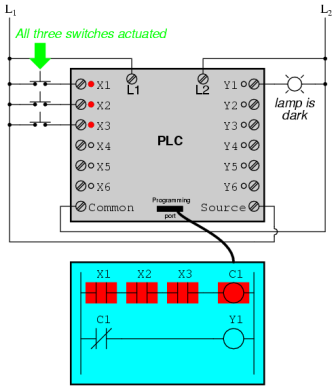
En aquest circuit, la làmpada està encesa fins que es prem un dels botons. Per apagar la làmpada, premeu els tres botons:
Aquest article sobre controladors lògics programables il·lustra només una petita mostra de les seves capacitats. Com a ordinador de PLC, pot realitzar altres funcions avançades amb molta més precisió i fiabilitat que quan s’utilitzen dispositius lògics electromecànics. La majoria dels PLC tenen més de sis entrades i sortides. La il·lustració següent mostra un dels PLC de Allen-Bradley:

Amb mòduls, cadascun dels quals té 16 entrades i sortides, aquest PLC té la capacitat de controlar una desena de dispositius.Situat en un armari de control de PLC ocupa poc espai (per als relés electromecànics que exerceixin les mateixes funcions, caldria molt més espai lliure).

Un dels avantatges del PLC, que simplement no es pot duplicar mitjançant un relé electromecànic, és el control i control remot a través de la xarxa digital de l’ordinador. Com que un PLC no és més que un ordinador digital especialitzat, pot "comunicar-se" fàcilment amb altres ordinadors. La foto següent és una representació gràfica del procés d’ompliment de líquids (estació de bombament per al tractament d’aigües residuals municipals) controlat per un PLC. A més, l'estació mateixa es troba a pocs quilòmetres del monitor de l'ordinador.
Consulteu també a electro-ca.tomathouse.com
: