Categories: Articles destacats » Electrònica pràctica
Nombre de visualitzacions: 79276
Comentaris sobre l'article: 4
Xips de lògica. Part 10. Com desfer-se del rebot dels contactes
 Utilitzant un disparador com a commutador
Utilitzant un disparador com a commutador
A les parts anteriors de l'article es van descriure activadors com D i JK. Aquí caldrà recordar que aquests desencadenants poden funcionar en mode de recompte. Això significa que quan el següent pols arriba a l’entrada del rellotge (per als dos disparadors aquesta és l’entrada C), l’estat del disparador canvia al contrari.
Aquesta lògica de funcionament és molt similar a un botó elèctric ordinari, com en una làmpada de taula: pressionada - encesa, pressionada de nou - apagada. En dispositius amb microcircuits digitals, el paper d'aquest botó és sovint realitzat pels disparadors que funcionen en mode de recompte. S’ofereixen pols d’alt nivell a l’entrada de recompte i els senyals de sortida de disparador s’utilitzen per controlar els circuits executius.
Semblaria molt senzill. Si simplement connecteu un botó a l’entrada C que connecta aquesta entrada a un fil comú quan es premeu, amb cada premsa, l’estat de desencadenament canviarà, com s’esperava, al contrari. Per assegurar-nos que no és així, n’hi ha prou amb muntar aquest circuit i prémer el botó: el disparador no s’instal·larà en la posició adequada cada cop, sinó més sovint després de diversos pressions del botó.
La condició de disparador es controla millor mitjançant un indicador LED, que s’ha descrit repetidament a les parts anteriors de l’article, o simplement mitjançant un voltímetre. Per què passa això, per què funciona el disparador de manera tan inestable, quina és la raó?
Què és el rebot de contacte
Resulta que el rebot dels contactes és la culpa de tot. Què és això? Qualsevol contacte, fins i tot el millor, fins i tot interruptors de canyaResulta que no tanquen immediatament. La seva connexió fiable és obstaculitzada per una sèrie de col·lisions, que duren aproximadament un mil·lisegon o més. És a dir, si premem el botó i el mantenim premut durant mig segon, això no vol dir que només s’hagi format un pols d’una durada així. El seu aspecte va precedit de diverses desenes, o potser fins i tot de centenars d’impulsos.
Arribant a l’entrada de comptatge del disparador, aquest pols el canvia a un estat nou, que correspon plenament a la lògica del disparador en mode de recompte: es comptaran tots els polsos i el resultat correspondrà al seu nombre. I la tasca és prémer el botó una vegada per canviar l'estat de disparador una sola vegada.
Un problema similar és encara més notable quan el contacte mecànic és un sensor de velocitat, per exemple, en un dispositiu de bobinatge de transformadors o en un cabalímetre: cada operació de contacte augmenta l'estat del comptador electrònic no per un, com s'esperava, sinó per un número aleatori. La història sobre els comptadors serà una mica més tard, però de moment només creieu que això és exactament, i no d’una altra manera.
Com desfer-se del rebot dels contactes
La sortida es mostra a la figura 1.
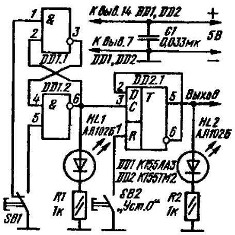
Figura 1. Pols anterior al disparador RS.
La manera més fàcil d’eliminar el rebot del contacte és amb el ja activat RS-trigger, que es reuneix en un xip lògic K155LA3, més precisament en els seus elements DD1.1 i DD1.2. Estem d’acord amb aquesta sortida directa Disparador RS aquest és el pin 3, respectivament, la sortida inversa és el pin 6.
Quan el disparador RS es reuneix a partir d'elements dels circuits lògics, és necessari fer un acord. Si el disparador és un xip acabat, per exemple K155TV1, la posició de les sortides directes i inverses s’especifica per les seves dades de referència. Però, fins i tot en aquest cas, si les entrades JK i C no s’utilitzen i el microcircuit s’utilitza simplement com a disparador RS, l’acord anterior pot ser força adequat. Per exemple, per la facilitat de muntar el xip a la pissarra.Per descomptat, al mateix temps, també es canvien les entrades RS.
En la posició del commutador que es mostra al diagrama, a la sortida directa del disparador RS, el nivell és una unitat lògica i a la inversa, per descomptat, un zero lògic. L’estat del disparador de comptatge DD2.1 fins ara es manté el mateix que es va fer quan es va encendre l’alimentació.
Si cal, es pot restablir mitjançant el botó SB2. Per restablir el disparador quan s’encén l’energia, es connecta un petit condensador entre l’entrada R i el fil comú, dins de 0,05 ... 0,1 μF, i una resistència amb una resistència d’1 ... 10 KOhm entre l’alimentació i l’entrada R. Fins que no es carrega el condensador a l’entrada R, hi ha una breu tensió lògica zero. Aquest curt pols zero és suficient per restablir el disparador. Si, d’acord amb les condicions de funcionament del dispositiu, cal establir el disparador a l’engegada a un sol estat, llavors una cadena RC es connecta a l’entrada S. Considerem el paràgraf sobre la cadena RC com una digressió lírica, i ara continuem lluitant contra el rebot dels contactes.
Si premeu el botó SB1 es tancarà el passador de contacte a la dreta a la connexió comuna. Al mateix temps, al terminal 5 del microcircuit DD1.2, apareixeran tota una sèrie de polsos de rebot. Però el rendiment de microxips de la sèrie fins i tot més lenta és molt superior a la velocitat dels contactes mecànics. I per tant, el primer pols de RS: el disparador es restablirà a zero, el que correspon a un nivell alt a la sortida inversa.
En aquest moment, es forma una caiguda de tensió positiva que, a l'entrada C, commuta el disparador DD2.1 a l'estat oposat, que es pot observar mitjançant el LED HL2. Els polsos de rebot posteriors no afecten l'estat del disparador RS, per tant, l'estat del disparador DD2.1 continua sense canvis.
Quan suelteu el botó SB1, el disparador dels elements DD1.1 DD1.2 es torna a un sol estat. En aquest moment, es produeix una caiguda de tensió negativa a la sortida invertida (pin 6 DD1.2), que no canvia l’estat del disparador DD2.1. Per tornar el botó de comptatge al seu estat original, caldrà tornar a prémer el botó SB1. Amb el mateix èxit en un dispositiu similar funcionarà i JK: disparador.
Aquest shaper és un circuit típic i funciona de manera clara i sense fallar. El seu únic inconvenient és l’ús d’un botó de contacte xip A continuació, es mostraran formadores similars, treballant a partir d’un botó amb un sol contacte.
Mesures per eliminar falses alarmes, anti-bloqueig
Al diagrama, podeu veure un nou condensador de parts C1, instal·lat al circuit d’alimentació. Quin és el seu propòsit? La seva tasca principal és protegir contra les interferències, a les quals no només són sensibles els desencadenants, sinó també tots els altres microcircuits.
Si toqueu els elements de muntatge amb un objecte metàl·lic, creareu un soroll d’impuls que pot canviar l’estat dels disparadors com vulgueu. Es crea la mateixa interferència en el circuit quan s'utilitza fins i tot un disparador, especialment diversos. Aquesta interferència es transmet a través dels autobusos d'alimentació d'un xip a un altre i també pot provocar un fals interruptor.
Per evitar que això passi als autobusos elèctrics i instal·li condensadors de bloqueig. A la pràctica, aquests condensadors amb una capacitat de 0,033 ... 0,068 μF s'instal·len a la velocitat d'un condensador per cada dos o tres microcircuits. Aquests condensadors es munten el més a prop possible dels terminals de potència dels microcircuits.
Una altra font de fals desencadenament de microxips poden ser els pins d'entrada no utilitzats. Principalment aquestes conclusions seran induïdes en pols d’interferència. Per combatre falses alarmes, els terminals d’entrada no utilitzats s’han de connectar mitjançant resistències amb una resistència d’1 ... 10 KOhm al bus positiu de la font d’energia. A més, si l’esquema no s’ha utilitzat elements lògics I NOAleshores, les seves entrades haurien de connectar-se a un cable comú, és per això que apareixerà una unitat lògica a la sortida d'aquests elements i connectar-les a les entrades de disparador no utilitzades.
Si s'utilitza un interruptor o botó de commutació com a font de senyal per a un microcircuit, llavors la situació en què el contacte està obert i un filferro suficientment llarg queda "penjat a l'aire" és completament inacceptable. Aquesta antena ja rebrà interferències amb molt d’èxit. Per tant, aquests conductors haurien de connectar-se al bus de potència positiva mitjançant una resistència amb una resistència d’1 ... 10 KOhm.
Supressió de converses de botons amb un parell de contactes
L'ús de botons amb un parell de contactes és molt més senzill, per la qual cosa s'utilitzen amb més freqüència que els botons amb contactes basculants. A la figura 2 es mostren diversos circuits dissenyats per suprimir la conversa de contactes d'aquests botons.
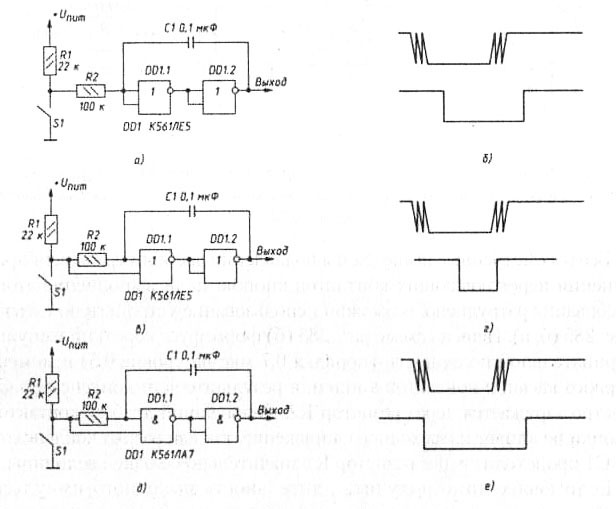
Figura 2
El funcionament d’aquests circuits es basa en retards de temps creats mitjançant cadenes RC. La figura 2a mostra un circuit que el seu funcionament retarda l'encesa i la desactivació; la figura 2c conté un circuit només amb un retard engegat i la figura 2d mostra un circuit amb un apagat retardat. Aquests circuits són vibradors únics, que ja s’han escrit en una part d’aquest article. Les figures 2b, 2d, 2e mostren els seus diagrames horaris.
És fàcil veure que aquests formadors estan fets en xips de la sèrie K561, que fa referència als xips CMOS, de manera que els valors de resistències i condensadors estan indicats específicament per a aquests xips. Aquests modeladors s’han d’utilitzar en circuits integrats en microcircuits de la sèrie K561, K564, K176 i similars.
Boris Aladyshkin
Consulteu també a electro-ca.tomathouse.com
: