Categories: Circuits de microcontroladors
Nombre de visualitzacions: 13565
Comentaris sobre l'article: 0
Disposa de connexió de dispositius a Arduino
Plataforma per als amants de la robòtica i l'automatització Arduino famós pel seu disseny modular i facilitat d’ús. De vegades em trobo amb un anunci on diuen que pots muntar el teu robot sense pràcticament estar familiaritzat amb l’electrònica. Però això no és del tot cert.
Si alguns actuadors i mecanismes estan connectats incorrectament, podeu gravar ports arduinka (com ja he esmentat a l'article sobre com no cremar Arduino) I si no sabeu manejar dispositius digitals, com a molt, simplement no podreu establir cap connexió.

He comprat diversos mòduls per a arduino, què fer després?
Per conèixer les característiques de la connexió, els voltatges d'alimentació, els nivells de lògica, etc. heu de familiaritzar-vos amb la fitxa de dades del vostre mòdul.
El full de dades o full de dades és la documentació tècnica del producte. Aquesta documentació es pot descarregar a qualsevol xip o sensor. Normalment es troben al lloc web del fabricant. A més, hi ha recursos especials a la xarxa, en els quals es recopila tota una massa de documentació tècnica
Llegiu detingudament la informació del full de dades, però què he de buscar? En primer lloc, un xip, a més de la part principal del nom, sol tenir una part o prefix variable, la majoria de vegades és una o més lletres.
Això indica algunes característiques d’un determinat microcircuit, per exemple, potència màxima, tensions d’alimentació i nivells lògics (si el dispositiu és digital), possiblement el cas en què s’executa, etc.
Si no heu trobat informació sobre nutrició i registreu-vos al full de dades. contacteu amb les comunitats arduino de parla russa; en els seus fòrums es solen considerar les característiques de tots els mòduls comuns.
ArduinoUno té un voltatge d’alimentació i nivells lògics de 5 V, si el dispositiu extern funciona en un rang de 3,3 V, hauràs de formar-los, pots organitzar potència mitjançant un estabilitzador LDO (lineal amb una baixada baixa, per estabilitzar-lo necessita almenys 1,3 volts d’excés de tensió com a màxim). actual, contra 2 volts sobre els estabilitzadors de la sèrie 78xx, cosa que permet obtenir 3,3 volts de 4,5 volts (bateries de tres dits).

La documentació tècnica per a sensors i dispositius digitals també indica els noms dels protocols mitjançant els quals "es comuniquen" entre ells. Aquests poden ser protocols individuals i estàndard, els mateixos:
-
UART
-
I2C;
-
SPI
Arduino treballa amb ells. D’aquesta manera us serà més fàcil trobar biblioteques preparades i mostres de codi.
Condicionament i amplificació del senyal
Molt sovint es plantegen preguntes sobre els aparells i els actuadors amb l’arduino. Considerem comuns:
1. Circuits de tensió coincidents.
2. La coordinació de la potència del pin de sortida i actuador, és a dir, l'amplificació de la tensió i / o el corrent.
Concordança de nivell
Què he de fer si els nivells de lògica del meu mòdul són de 3,3 Volts i els de 5 volts? És bastant senzill utilitzar un convertidor de nivell lògic. Es pot assemblar a partir d’elements discrets o es pot adquirir un mòdul ja preparat a la pissarra, per exemple això:

Aquest convertidor és bidireccional, és a dir. baixa el nivell alt i augmenta la resposta baixa. LV (1,2,3,4) - plataformes per connectar senyals de baix nivell, HV (1,2,3,4) - nivells alts, HV i LV sense números - es tracta de voltatges de 5 i 3,3 Volts, igual que amb fonts de senyals convertides. GND: terra o fil negatiu. En un cas concret hi ha 4 canals independents.
Concordança de circuits amb grans diferències de tensió
Si voleu iniciar un senyal, per exemple, a circuits d’alta tensió, per exemple, a 220 V, haureu d’utilitzar un optoparell.Això proporcionarà un aïllament i protecció galvànica contra les explosions d’alta tensió de les entrades del microcontrolador. Aquests circuits s'utilitzen tant per rebre un senyal com per a senyals de sortida d'un microcontrolador a una xarxa, així com per controlar els triacs en cadenes.

La probabilitat d’aparició d’un potencial elevat a la placa arduino en aquest cas és extremadament petita, això es garanteix per l’absència de contacte elèctric i la comunicació es fa a través d’un canal òptic, és a dir. amb l’ajut de la llum. Podeu obtenir més informació sobre aquest tema estudiant dispositius fotogràfics i optoelectrònics.
Si es produeix un salt important, l’optopplicador es cremarà, la imatge és PC8171, però no sobrecarregueu els ports del microcontrolador.
Connexió de consumidors potents
Com que el microcontrolador només pot controlar el funcionament dels dispositius, no podeu connectar un consumidor potent al seu port. Exemples d’aquest tipus de consumidors:
-
Relé
-
Solenoides;
-
Motors elèctrics;
-
Servos.
1. Connexió Servo
La tasca principal del servoaccionament és establir la posició del rotor connectat als actuadors, controlar-lo i canviar-lo fent petits esforços. És a dir, vosaltres, amb l’ajut d’un potenciòmetre, si el servoaccionament està dissenyat per girar a mitja revolució (180 graus) o amb el codificador, si cal una rotació circular (360 graus), podreu controlar la posició del servomotor (motor elèctric en el nostre cas) de potència arbitrària.

Molts aficionats a la robòtica utilitzen arduino com a base dels seus robots. Aquí els servos han trobat un gran ús. S’utilitzen com a unitat de mecanismes rotatius per a càmeres, sensors i mans mecàniques. Els modelistes de ràdio utilitzen per conduir rodes girants en models de cotxes. La indústria utilitza grans unitats en màquines CNC i altres automatitzacions.

En els serveis petits per a aficionats, hi ha integrada una placa amb sensor de posició i electrònica. Normalment se’n surten tres cables:
-
Potència vermella: més potència, si una unitat potent es connecta millor a una font externa i no a la placa Arduino;
-
Negre o marró - menys, la connexió a més;
-
Groc o taronja -el senyal de control- s’alimenta des del pin digital del microcontrolador (sortida digital).
Es proporciona una biblioteca especial per a la gestió del servidor, l’accés al mateix es declara al principi del codi amb la comanda "#include servo.h".
Connexió del motor
Per conduir mecanismes i ajustar la seva velocitat de rotació, és més fàcil utilitzar DPT (un motor de corredor continu DC amb excitació dels imants permanents). Probablement heu vist aquests motors en cotxes controlats per ràdio. S’inverteixen fàcilment (s’activen per girar en la direcció correcta) només cal canviar la polaritat. No intenteu connectar-los directament als pins.
Millor utilitzar un transistor. Encaixarà qualsevol bipolar, almenys directa (pnp), com a mínim revers (npn) de conductivitat. També funciona el camp, però, en triar-ne un, assegureu-vos que l’obturador funciona amb nivells lògics?
En cas contrari, no s’obrirà completament o cremarà la sortida digital del microcontrolador mentre carregues la capacitat de la porta: utilitzen un controlador, la manera més senzilla és bombar el senyal a través d’un transistor bipolar. A continuació es mostra el circuit de control a través transistor d’efectes de camp.

Si no hi ha cap resistència entre G i S, l'obturador (G) no es llençarà a terra i pot "caminar" espontàniament per interferències.
Com determinar que un transistor amb efecte de camp és adequat per al control directe des d’un microcontrolador, vegeu més avall. Al full de dades, cerqueu el paràmetre Vgs, per exemple, per a IRL540 totes les mesures i gràfics estan lligades a Vgs = 5v, fins i tot un paràmetre com la resistència del canal obert està indicada per a aquesta tensió entre la porta i la font.


A més del raspall DPT, el refrigerador es pot connectar des de l’ordinador de la mateixa manera, tot i que hi ha un motor sense escombretes, els enrotllaments dels quals estan controlats pel convertidor integrat, la placa del qual es troba directament en el seu cas.
Els revolucions d'aquests dos tipus de motors són fàcilment ajustables, variant la tensió d'alimentació. Això es pot fer si la base del transistor està connectada no en digital (sortida digital), sinó amb un pin (~ pwm), el valor del qual està determinat per la funció "analogWrite ()".
Relés i solenoides
Per a circuits de commutació on no és necessària la regulació i és convenient utilitzar un relé de commutació freqüent. En triar l’adequat, podeu canviar qualsevol corrent i tensió amb pèrdues mínimes en conductivitat i escalfament de les línies elèctriques.
Per fer-ho, apliqueu la tensió necessària a la bobina del relé. Al circuit del relé, la seva bobina està dissenyada per controlar 5 volts, els contactes de potència poden canviar tant un parell de volts com una xarxa de 220 V.

Els solenoides són bobines o actuadors electromagnètics.
Exemples:
-
L’accionament bloqueja les portes del cotxe;
-
Vàlvules de solenoide;
-
Electroimant en producció metal·lúrgica;
-
La central elèctrica de la pistola gaussiana i molt més.
En qualsevol cas, un circuit típic per connectar bobines de corrent continu a un microcontrolador o lògica s’assembla a això:
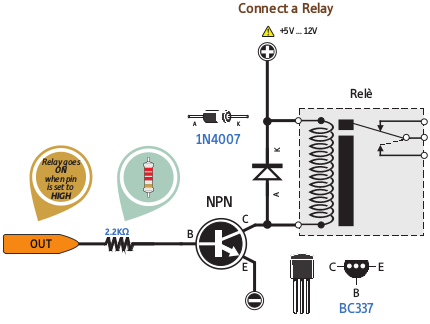
Un transistor per amplificar el corrent de control, el díode està connectat en sentit contrari per protegir la sortida del microcontrolador contra les explosions d’EMF d’auto-inducció.

Dispositius d’entrada i sensors
Podeu controlar el sistema amb botons, resistències, codificadors. Amb el botó, podeu enviar un senyal a l’entrada digital del nivell arduino (alt / 5V) o baix (baix / 0V).
Per fer-ho, hi ha dues opcions d’inclusió. Necessiteu un botó normalment obert sense arreglar; per a alguns propòsits, necessiteu un interruptor de commutació o un botó amb fixació, tria el vostre compte, segons la situació. Per enviar una unitat, heu de connectar el primer contacte del botó a la font d’energia i el segon al punt de connexió del resistor i l’entrada del microcontrolador.

Quan es prem el botó sobre la resistència, la tensió d’alimentació baixa, és a dir, d’un nivell alt. Quan no es prem el botó, no hi ha corrent en el circuit, el potencial a la resistència és baix, s’aplica el senyal “Baix / 0V” a l’entrada. Aquesta condició s'anomena "el pin es tira a terra i la resistència és" desplegable ".
Si voleu que el microcontrolador tingui 0 en comptes d’1 quan feu clic al botó, connecteu el botó normalment tancat de la mateixa manera o llegiu com fer-ho amb normalitat obert.

Per donar al microcontrolador un comandament amb un senyal zero, el circuit canvia lleugerament. Una pota de resistència està connectada al voltatge d’alimentació, la segona al punt de connexió del botó normalment obert i l’entrada digital del arduino.
Quan es deixa anar el botó, hi ha tota la tensió, l’entrada obté un nivell alt. Aquest estat s'anomena "pin is pull up to plus" i la resistència és "pull-up". Quan premeu el botó esteu fent fora (tancant) l'entrada al terra.
Divisor de tensió i entrada de senyal del potenciòmetre i analògic resistiu

El divisor de tensió s'utilitza per connectar resistències variables, com ara termistors, fotoresistors, etc. Degut al fet que una de les resistències és constant i la segona variable, podeu observar el canvi de tensió en el punt mig, a la imatge de dalt s’indica com a Ur.
Així, és possible connectar diversos sensors analògics de tipus resistiu i sensors que, sota la influència de forces externes, canvien la seva conductivitat. A més dels potenciòmetres.
A la imatge següent, veieu un exemple de connexió d'aquests elements. El potenciòmetre es pot connectar sense una resistència addicional, i a la posició extrema hi haurà tensió completa, però en la posició mínima cal assegurar estabilització o limitació de corrent; en cas contrari, curtcircuit.

Conclusions
Per connectar qualsevol mòdul i addicionalment al microcontrolador sense errors, cal conèixer els fonaments bàsics de l’enginyeria elèctrica, la llei d’Ohm, la informació general sobre l’electromagnetisme, així com els fonaments bàsics del funcionament dels dispositius semiconductors. De fet, podeu assegurar-vos que tot això és molt més fàcil de fer que escoltar aquestes paraules complexes. Utilitzeu els esquemes d’aquest article als vostres projectes!
Consulteu també a electro-ca.tomathouse.com
: